








さる9月5日、宇宙航空研究開発機構(JAXA)の探査機「はやぶさ2」が小惑星リュウグウを調べたところ、赤道での重力が地球の8万分の1程度、質量は約4.5億トンでした。来月(10月)には、着陸→サンプル収集という山場のオペレーションを迎えますが、それに先立って9月21日に2台の小型ローバー「ミネルバ2」を分離して地表に降下させます。 「はやぶさ」に搭載した「ミネルバ」 (図1)の後継機として開発されたもので、「ミネルバⅡ-1」と「ミネルバⅡ-2」を搭載しています。「ミネルバⅡ-1」の箱を開けると、「ミネルバⅡ-1A」と「ミネルバⅡ-1B」という2台の可愛いローバーが出てきます(図2)。9月21日に放出されるのはこの「ミネルバⅡ-1」だけなので、今回は、これについてだけ説明しましょう。俗称「ぴょんぴょんローバー」。
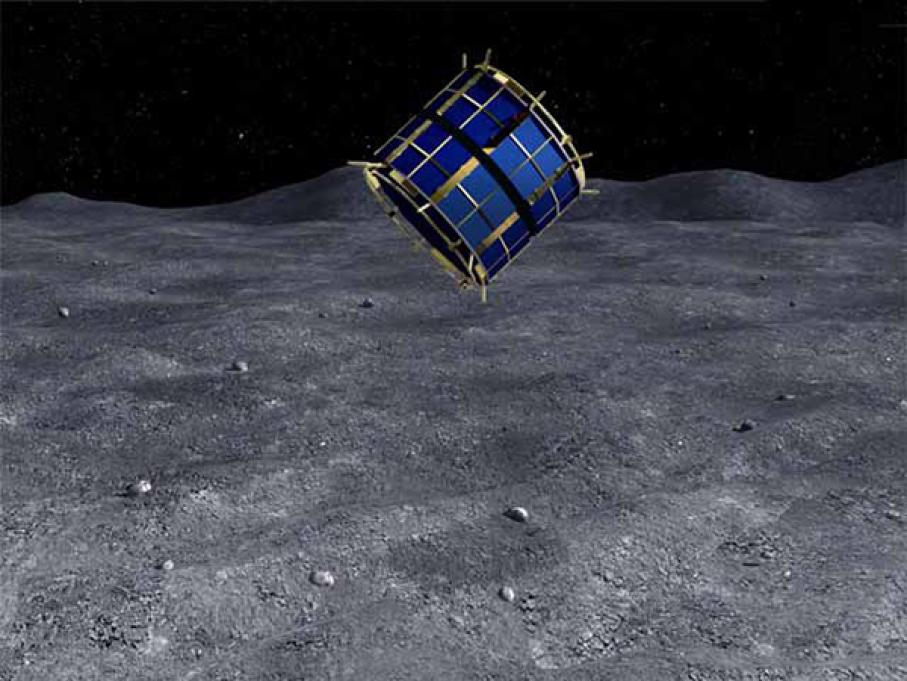 図1 初代「はやぶさ」に搭載した「ミネルバ」のイメージ
図1 初代「はやぶさ」に搭載した「ミネルバ」のイメージ
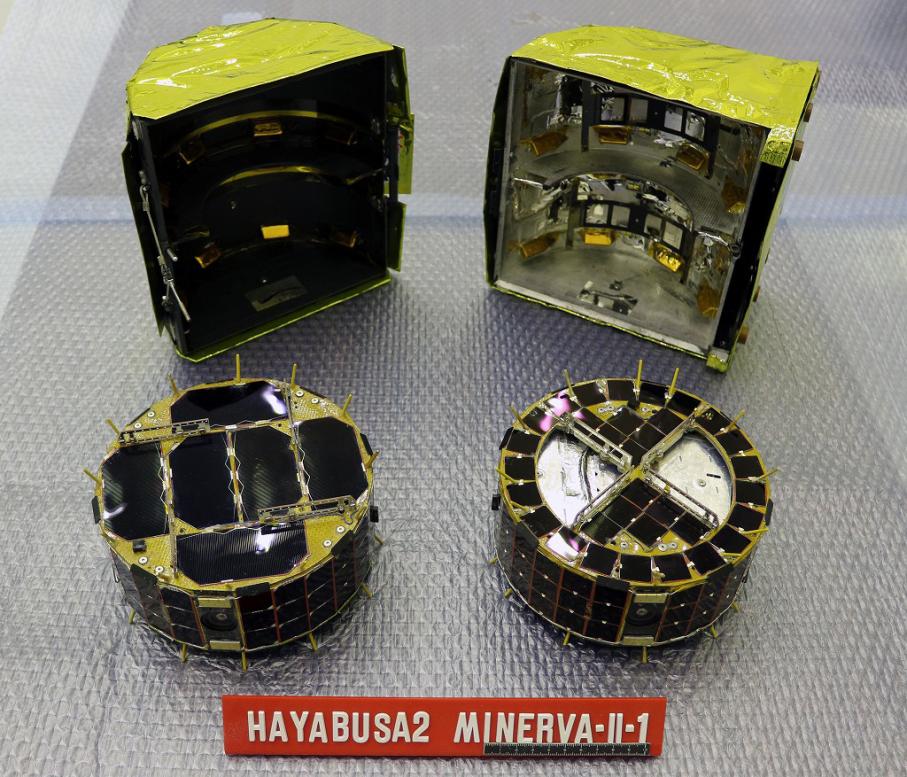 図2 「ミネルバ2」
図2 「ミネルバ2」
【ぴょんぴょんローバー「ミネルバ2」】
初代「はやぶさ」に乗っていた同じようなローバー「ミネルバ」は1台だけでしたが、「はやぶさ2」の「ミネルバⅡ-1」のぴょんぴょんローバーは2台。細かいところは違いますが、目的や移動のメカニズムは同じです。
「ミネルバ2」のⅡ-1(以後、簡単のためにこの2台のⅡ-1のことを単に「ミネルバ2」と呼びますね)は、一言で言えばカメラマンです。
図2で分かるように、それぞれがバウムクーヘンみたいな平べったい円柱形の小型ローバーです。それぞれの大きさは直径18cm×高さ7cm、重さは1.1kg。この小さな体の中にカメラなどの各種センサー、移動機構、通信機、計算機、電源などが搭載されていて、自律的に小惑星表面を移動しながら、地表の様子を観測できるようになっています。
カメラとしては、ステレオカメラと広角カメラの2種類。着地しているときには、ステレオカメラで近くを立体的に見て、ぴょんぴょんホップしている時には、広角カメラで広い範囲を撮影します。図2のローバー本体の手前に見えているのが広角カメラで、ステレオカメラは反対側にあります。初代ミネルバでは、ソニー製のカメラが使われたことが話題になりましたが、「ミネルバ2」でも、民生品のカメラを活用しており、放射線等の環境試験を行ってから搭載しました。
【「ミネルバ2」はどうやって跳びはねるのか?】
天体の地表に降り立って移動するローバーといえば、現在火星表面で活躍している「キュリオシティ」のように、普通はタイヤの付いたタイプがおなじみですね(図3)。そういうタイプのローバーはこれまでにいくつもありましたが、この可愛いロボットのローバー「ミネルバ2」は、初代「はやぶさ」の「ミネルバ」と同じように、リュウグウの表面を跳びはね、場所をあちこち変えながら温度測定や撮影をするよう設計されています。
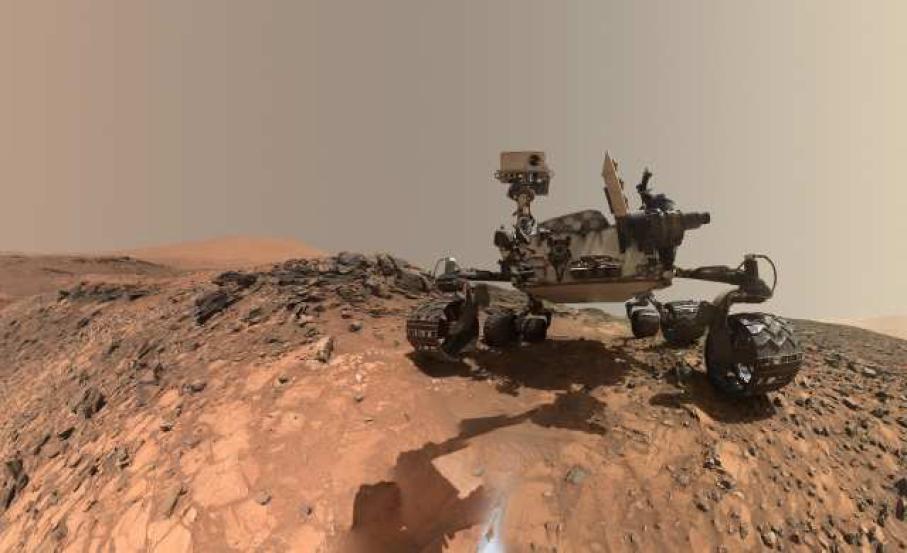 図3 火星面上のローバー「キュリオシティ」
図3 火星面上のローバー「キュリオシティ」
彗星や小惑星くらいの小さな天体を動きまわったローバーは見たことがありません。実は初代「はやぶさ」の「ミネルバ」はうまく着陸することができなかったので、今回の「ミネルバ2」が投下され着陸して活動できると、動き回るローバーとしては、人類史上初の快挙となります。
意外に思うかもしれませんが、月や火星のような重力の大きい天体の移動よりも、イトカワやリュウグウのように直径が1kmに満たない、重力の小さい天体の上を移動する方が遥かに難しいんですね。ちょっとした地形の凹凸でもすぐに車体が浮き上がってしまうので、車輪などが空回りしやすいのです。
そこで、この「重力が小さくて浮き上がりやすい」ことを逆に活用することにして、ミネルバシリーズではホッピングによる移動機構を開発しました。逆転の発想ですね。
図2の「ミネルバ2」の写真を見てください。太陽パネルをいっぱい貼った機体の端に小さな棘のような物が付いていますね。私は、これを初めて見た時、この棘みたいなものを使って跳ねるのかと思いました。「ホップする」と言うと、バッタみたいに足を曲げてから伸ばしながら跳ぶことを連想しますよね。ところが、「ミネルバ」には、ホップするための機械は付いていません。
ではどうやって跳びはねるのか? 本体内部に、おもり(アルミ製の円板)を付けたDCモーターを搭載します。モーターを回転させると、逆向きに回転しようとする力が発生します。回転椅子に座って、伸ばした腕を左に回すと、体が右に回るのと原理は同じです。この力によって、さっきの棘を地面にひっかけて、蹴りあがるわけ(図4)。つまりモーターの円板(水色)が回転すると、本体(黄色)には逆向きのトルクが発生して飛び上がるのです。
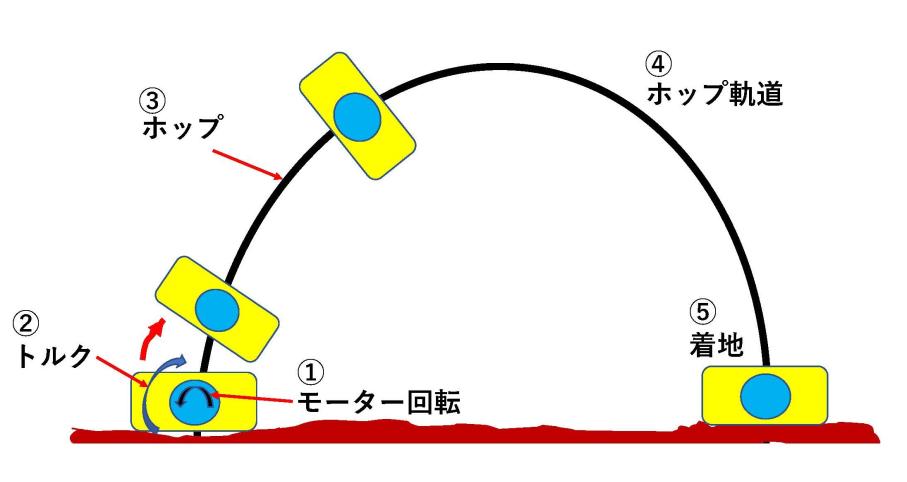 図4 ミネルバ2の跳びあがり方
図4 ミネルバ2の跳びあがり方
【初代「はやぶさ」の思い出】
2005年、初代「はやぶさ」のオペレーションが佳境にさしかかっていた時のことです。この年の11月12日、1回目のタッチダウンに先立って行われた降下リハーサルで、初代ミネルバが母船「はやぶさ」から分離されました。このとき、本来は降下中に放出すべきだったのですが、うまくタイミングが合わず、上昇中に放出されてしまい、小惑星イトカワの引力の弱さもあって、ミネルバはイトカワに接近することができなかったのです。
これは、ミネルバの放出を地球からの遠隔操作でやろうとしたことが原因でした。でもこれはやむを得ない措置でした。「はやぶさ」には、小惑星までの距離を計測できるレーザー高度計(LIDAR:ライダー)が搭載されているので、本来であれば、この計測値をチェックしながら自動で放出するようにしておけば、上昇中に放出するようなミスは防げたはずです。でもあの時点では、LIDARの値が信用できるのかどうか、まだ分からなかったのです。
リハーサルで動作を確認した後なら、計測値を信用できるようになるのでしょうが、あの時はリハーサルの前でした。まだ完全には信用できないというので、地上からコマンドを送り、手動で放出することになったわけ。ところが、イトカワや「はやぶさ」までの距離は約3億km。電波がイトカワとの間を往復するのには、約30分以上の時間がかかってしまいます。30分以上後の母船の位置と速度を見越してタイミングを図る必要があり、これは非常に難しいワザでした。
あの「ミネルバ」放出のとき、川口淳一郎プロジェクトマネジャーが、「ミネルバ」担当の久保田孝さんに「もしうまく行かなかったらごめん」とあらかじめ言っていたのを思い出します。久保田さんは「大丈夫、分かっています」と「覚悟はできている」という表情で答えていました。そして、結局うまくタイミングが合わず、スラスターを噴射して上昇を始めた後に分離コマンドが届いてしまい、着陸できなかったのです(図5)。残念無念。
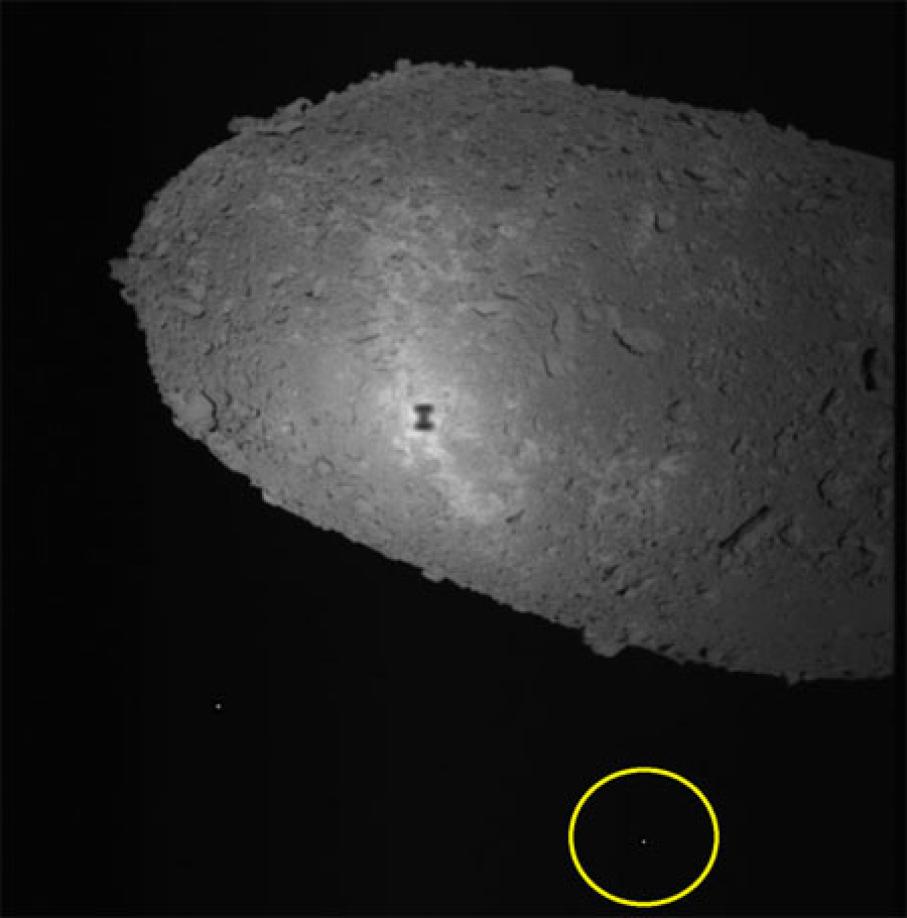 図5 残念ながら小惑星イトカワのそばを通過する「ミネルバ」(黄色円内:「はやぶさ」のカメラが撮影)
図5 残念ながら小惑星イトカワのそばを通過する「ミネルバ」(黄色円内:「はやぶさ」のカメラが撮影)
【期待される9月21日】
「ミネルバ2」自体には推進系が乗っていないので、対策は基本的に、自動でしっかり降下中に分離してもらうことしかありません。ただし今回は、初代「はやぶさ」の時と比べると、小惑星における滞在期間が1年半と長いという有利な条件があります。運用に余裕があるので、リハーサルやタッチダウンなども、あまり時間がなかった初代「はやぶさ」ほど焦ってやる必要はありません。落ち着いて実行して成功させてほしいですね。
でも、リュウグウの上で、ぴょんぴょん移動しながら写真を撮った可愛いカメラマンは、「はやぶさ2」が地球に帰る時には、置き去りにされてしまいます。ちょっと可哀想。だから、写真撮影に成功したら、小惑星に残る「ミネルバ2」に大きな拍手を送ってあげましょうね。では9月21日の「ミネルバ2」の成功を期待しましょう。来週は、そのオペレーションの様子と、すでに決定した本体の着陸候補地点のことを話しましょう。
[図クレジット]図1,2,5 JAXA 図3 NASA 図4 筆者
