








宇宙航空研究開発機構(JAXA)は、すでに小惑星探査機「はやぶさ2」による小惑星リュウグウへのタッチダウン(着地)候補地点を選定しました。そして、9月10日から11日にかけて降下リハーサルを行ったのですが、予想外の事態が起きて、途中で中止しました。いよいよオペレーションのクライマックスが近づいている気配がしてきました。来年末のリュウグウ出発までには、時間が十分あるので、スケジュールをどうするかを含め、チームは、熱心に、しかし落ち着いて相談をしています。
さる8月17日、JAXA相模原キャンパスに、国内および国際のメンバーが合計109人集まりました。そのうち外国の人は39人。ここに至るまでに本格的にこの着地点選定の作業を始めたのは2年前です。周到な準備期間があったのですが、8月17日の議論はそれでも1日かかりました。本当は午後4時で終わるはずだったのですが、議論が白熱して、午後7時までかかって結論が出ました。
リュウグウ表面は予想以上に岩だらけで、どこにでも巨大な岩や岩塊(ボルダー)が存在しているので、着地点を探すのは大変な苦労となりました。初代「はやぶさ」が降下した小惑星イトカワも、同じように岩だらけだったのですが、ほんの少しだけ、他の地形と違って比較的岩の少なそうな場所があるように見えたので、そこ(ミューゼスの海、図1)に降りることに決めたのですが、リュウグウは、どこも同じように一様に岩石がある(図2)ので、選定には難儀しました。
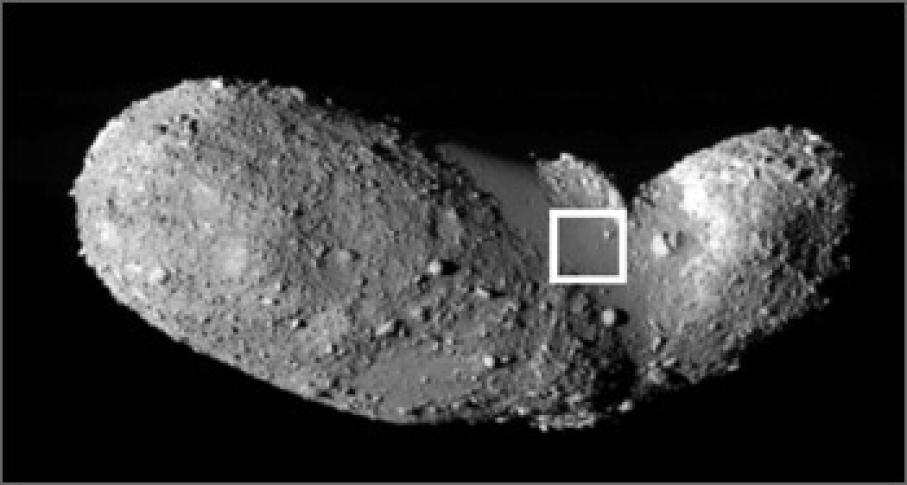 図1 初代「はやぶさ」の着地点(イトカワ表面)
図1 初代「はやぶさ」の着地点(イトカワ表面)
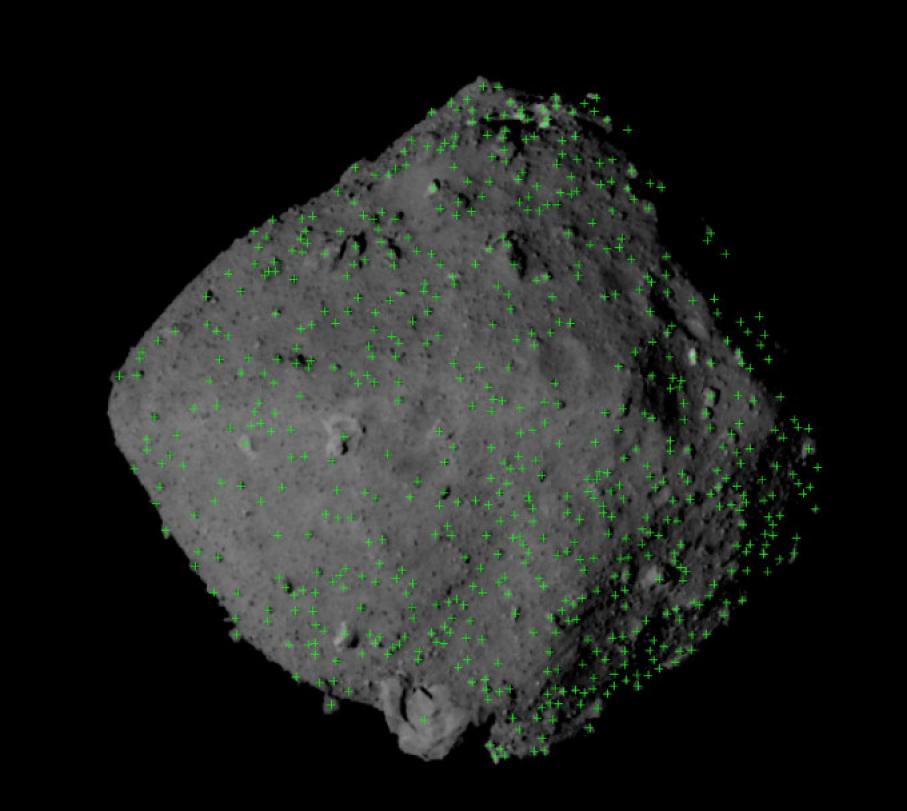 図2 リュウグウ表面上の岩塊の分布(正面の経度300度)。緑色のマークは見かけ上8mから10m以上の岩塊を示す。リュウグウの北極が上
図2 リュウグウ表面上の岩塊の分布(正面の経度300度)。緑色のマークは見かけ上8mから10m以上の岩塊を示す。リュウグウの北極が上
はやぶさ2は、今年10月と来年の冬と春、計3回タッチダウンを行って、リュウグウ表面のサンプルを採取する計画になっています(図3)。そのうちの1回(おそらく3回目)は、銅の塊をリュウグウ表面に打ち込んでクレーターを人工的につくり、リュウグウの内部から顔を出したサンプルも採取する予定(図4)です。今回選ばれたのは第1回目のサンプル収集の場所です。
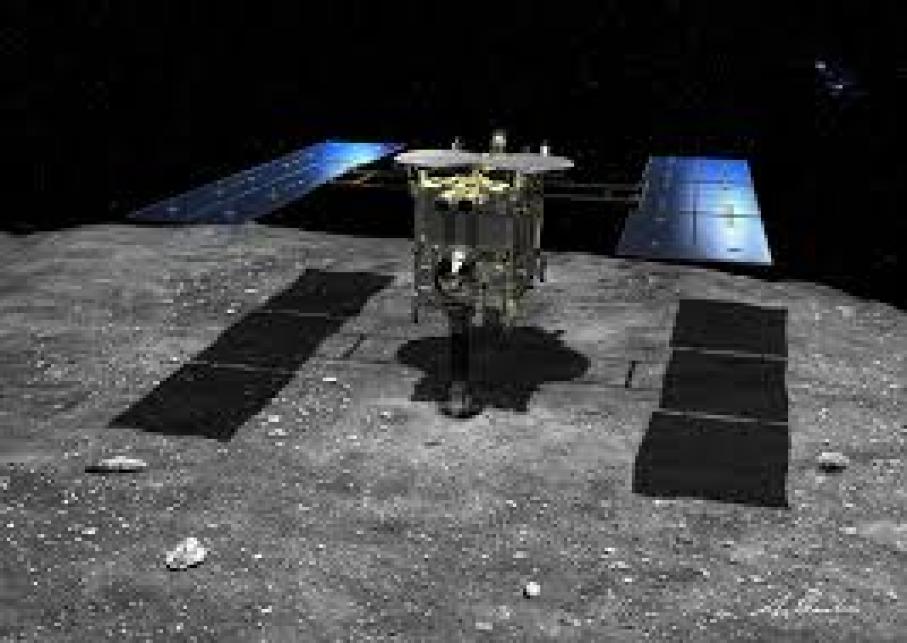 図3 「はやぶさ2」タッチダウンの想像図
図3 「はやぶさ2」タッチダウンの想像図
 図4 「はやぶさ2」が人工クレーターにタッチダウン(想像図)
図4 「はやぶさ2」が人工クレーターにタッチダウン(想像図)
着地候補の選定にあたっては、赤道から緯度プラスマイナス30度であることが最優先されます。接近して分かったのは、リュウグウの自転軸が南北に立っていたので、好条件となりました。その結果として緯度プラスマイナス30度─リュウグウの半径が500mなので、地球とリュウグウを結ぶ線から200mまでは離れられることになります。このリュウグウの赤道を中心とするプラスマイナス200m以内の領域で、以下の4つの条件が挙げられました:
(1)地面の平均的な傾きが30度以内──地形ですね。「はやぶさ2」が地球と小惑星を結ぶラインに沿ってリュウグウに近づいた時に、表面にタッチする瞬間は、サンプルをとるために、「はやぶさ2」の姿勢がリュウグウの表面にならった姿勢になる必要があるのです。このときに太陽電池が依然として太陽の方向を向いてないと発電できないので、そのために平均斜度30度以内という条件が付きました。
(2)直径100mにわたり、平坦な部分であること──着陸誤差も考えて、「はやぶさ2」の安全にとって重要な条件ですね。
(3)岩塊の高さが50cm以下であること──これはサンプルをとるときのサンプラーホーンの長さのためです。サンプラーホーンと「はやぶさ2」本体の間の高さが約1mですから、これより高い岩があると、探査機に傷がつく可能性があります。少し余裕をもって50cm以下が望ましいということです。
(4)表面が97℃以下であること──機器の受けるダメージを考慮した条件です。設計上の条件が370K(絶対温度)、これをセ氏に直すと97℃、およそ100℃です。太陽を背にして降下しますから、向かう表面は太陽に照らされて熱くなっているんですね。
長い時間にわたる議論・検討の結果、リュウグウ赤道上の「L08」と呼ばれる100m四方のエリアが、本体による第1回目のサンプル収集の候補地点として選ばれました。そして、L08のすぐ隣にある「L07」と、少し南に下がった中緯度の「M04」の2つのエリアがバックアップ地点とされました。表面が予想以上に岩だらけの凸凹だったので、念を入れてバックアップも選び、リハーサルを経てから完全確定します。
いわゆるメルカトール図法で着地候補地点を示したのが、図5です。上がリュウグウの北です。これは展開図で、「はやぶさ2」が撮った画像を貼り合わせて作ったモザイク画像になっています。それぞれの領域を、高度6kmから撮られた画像で示しておきます(図6)。すべて上が小惑星リュウグウの北極です。四角形のサイズが約100mです。
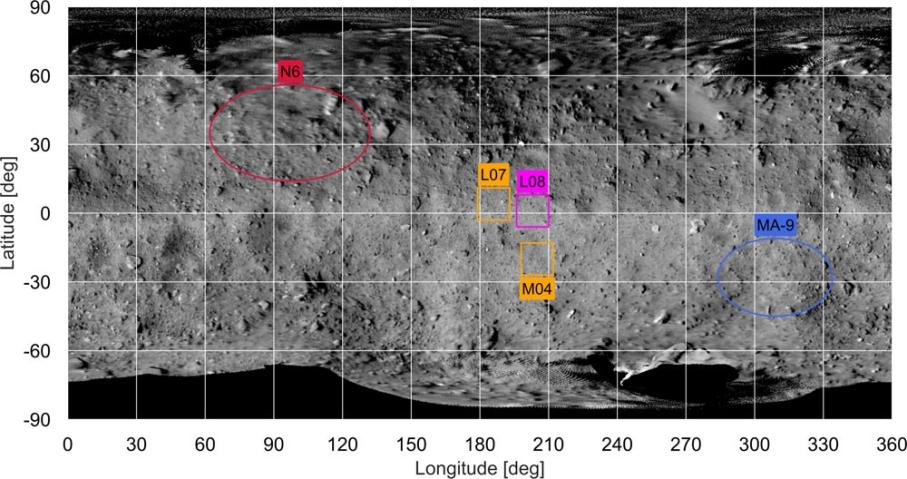 図5 「はやぶさ2」の着地候補地点(リュウグウ)
図5 「はやぶさ2」の着地候補地点(リュウグウ)
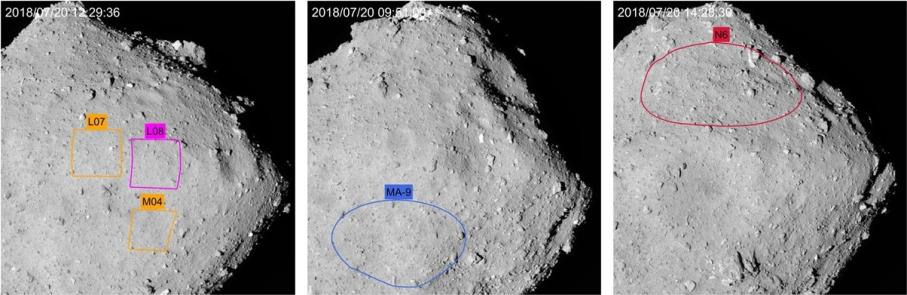 図6 「はやぶさ2」着地候補地点の位置
図6 「はやぶさ2」着地候補地点の位置
「はやぶさ2」に搭載されている探査ロボットは4つあります(図7):
 図7 左が2機の「ミネルバⅡ-1」と「ミネルバⅡ-2」、右が「マスコット」のイメージ
図7 左が2機の「ミネルバⅡ-1」と「ミネルバⅡ-2」、右が「マスコット」のイメージ
・「ミネルバⅡ-1」(ぴょんぴょんローバー)──JAXA、東京大学などが開発(左図の左と中央)
・「ミネルバⅡ-2」ローバー──東北大学などが開発(左図の右)
・「マスコット」──ヨーロッパが開発したローバー(中央と右図)
これらのロボットが降りる地点は、サンプル採取のための地点と重なると、「はやぶさ2」の着地の際に困るし、ロボットも他のロボットの上に降りるわけには行きませんから、もちろん科学的に意味のある場所で別々の地点を選びました。「ミネルバⅡ-1」については「N6」という北半球のエリア、「マスコット」は「MA-9」という南半球のエリアが着地点候補です。「ミネルバⅡ-1」も「マスコット」も、「はやぶさ2」から分離されたあと、バウンドして最終着地点に到達するので、いずれも少し広めのエリアを取ってあります。記号L、Mは、低緯度(L)、中緯度(M)を指します。なお、「ミネルバⅡ-2」の着地点は未定です。
降下に直接つながるオペレーションとして、まずタッチダウンの1回目リハーサル(リハ1)を9月11~12日に実施したのですが、途中で「はやぶさ2」が自分で危険と判断して、途中で降下を中止し、再び元の位置に舞い戻りました。おそらく「はやぶさ2」のオペレーションとしては、ほとんど初めて直面した「壁」ですね。
今回のリハーサルでは、リュウグウ表面に高度40mまで降下し、着地しないで再上昇する予定でした。降下の手順をしっかりと訓練しつつ、リュウグウ表面を至近距離から撮影することで、タッチダウン候補地点の安全性を確認することを目的とするリハーサルでした。ところが、高度約600mまで降りたところで、「はやぶさ2」が自動的に止まり、上昇して、ホームポジションと呼ばれる元の位置(高度20km)まで舞い戻ったのです。すべて「はやぶさ2」本体のコンピューターが自分で判断して起こした行動です。
そのリハーサルの様子は、電波で地球に送られてきました。JAXAのホームページには、降下につれてだんだん大きくなっていくリュウグウの姿が、リアルタイムで配信されていました(たとえば図8)。
詳しくは次のページを見てください。
http://www.hayabusa2.jaxa.jp/galleries/onc/nav20180911/
はやぶさ2プロジェクトサイト(外部サイトへリンク)
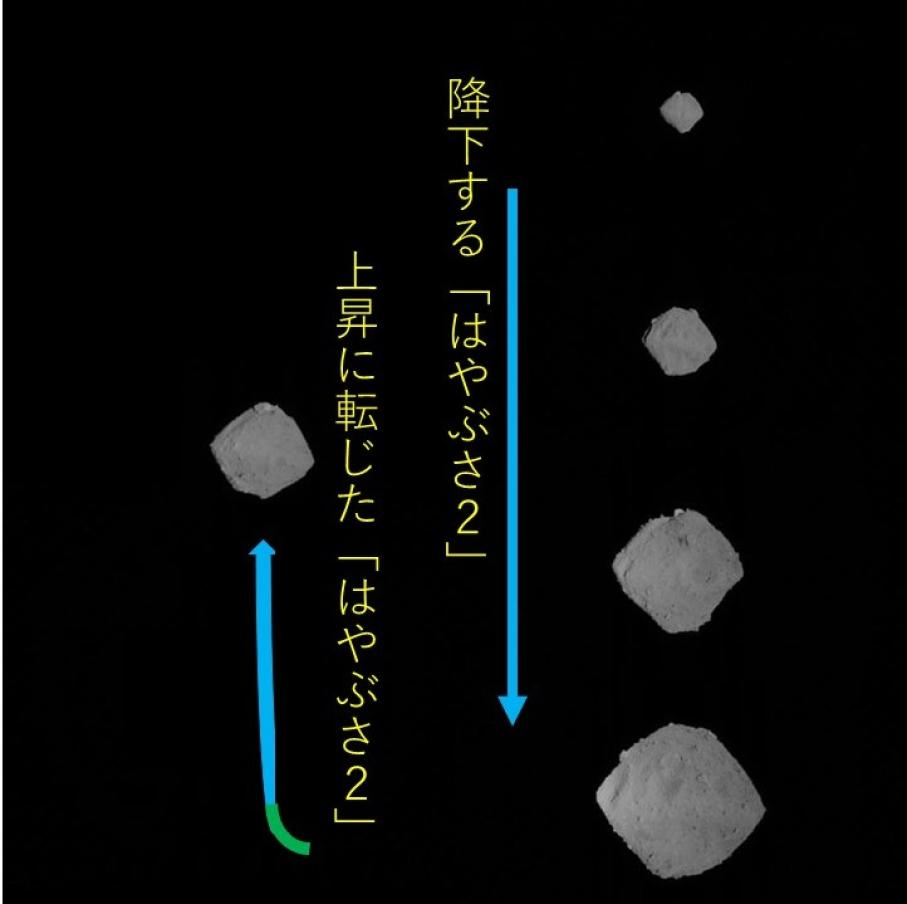 図8 「はやぶさ2」リハーサル1のリアルタイム配信(抜粋)
図8 「はやぶさ2」リハーサル1のリアルタイム配信(抜粋)
さまざまなデータを解析した結果、降下を中止した原因は、リュウグウの表面の光反射が予想以上に弱く、「はやぶさ2」とリュウグウ地表との距離を測るためのレーザー高度計(LIDAR、ライダー)がうまく働かなかったからだということが分かりました。賢い判断ですね。まさしく鉄腕アトムばりです。
第一回のリハーサルは中止になりましたが、「はやぶさ2」には全く異常がなく、チームは、低い高度でのはやぶさ2の応答の状況が分かり、着陸候補エリアの高解像度の貴重な画像が新たに得られたので喜んでいます。一歩一歩未踏の領域が狭くなっていることを実感しているようですよ。これらのデータを、次のローバー分離や着陸運用に役立てるべく、プロジェクトチームの解析作業が続いています。次の計画発表を今しばらく待つことにしましょう。
これまで発表されていたスケジュールでは、リハーサルの後、ミネルバⅡ-1の着地を9月20・21日、マスコットの着地を10月2~4日に行うことになっていましたが、先日のリハーサルの結果を踏まえて、ロボットの降下スケジュールを見直すかも知れません。また、今のところは、「はやぶさ2」本体のタッチダウンの2回目のリハーサルを10月中旬に行い、本番のタッチダウンは10月下旬を想定していますが、これも、今後のリハーサルの様子を見てから最終決定に至るでしょう。まだまだ予断は許しませんね。正式に決定したら、このページですぐに紹介しましょう。
[図クレジット]図1,2,4,5,6,7 JAXA 図3 池下 章裕 図8 筆者
