








宇宙航空研究開発機構(JAXA)は、さる9月21日、小惑星探査機「はやぶさ2」から搭載したローバー「ミネルバⅡ-1」を分離し、小惑星リュウグウに着陸させることに成功しました。送ってきた写真やデータから、リュウグウ表面を移動していることも確認し、小惑星表面で移動しながら探査をする世界で初めての人工物となりました。「はやぶさ2」は、リュウグウ表面から高度55mあたりまで降下し、自らの判断でローバー切り離しの動作をしたんですよ。もちろん人間が作成したプログラムを、探査機に搭載しているコンピューターが忠実に実行したわけですが、それにしても自分で何もかもやるなんて、まるで鉄腕アトムみたいで凄いですね。
「はやぶさ2」の下面には、「ミネルバⅡ-1」と「ミネルバⅡ-2」が収納されていて
(図1)、今回分離し着陸したのは「Ⅱ-1」の方です。「ミネルバⅡ-1」は、本体から分離直後にケースの蓋が開いて、小さなローバーが2台飛び出します。両機とも状態は正常で、内蔵したモーターの回転の反動を使って、リュウグウ表面をぴょんぴょん跳びはねながら観測します(図2)。図3に、この「ぴょんぴょんローバー」(俗称)から降下中と着陸後に送られてきた写真を示しました。
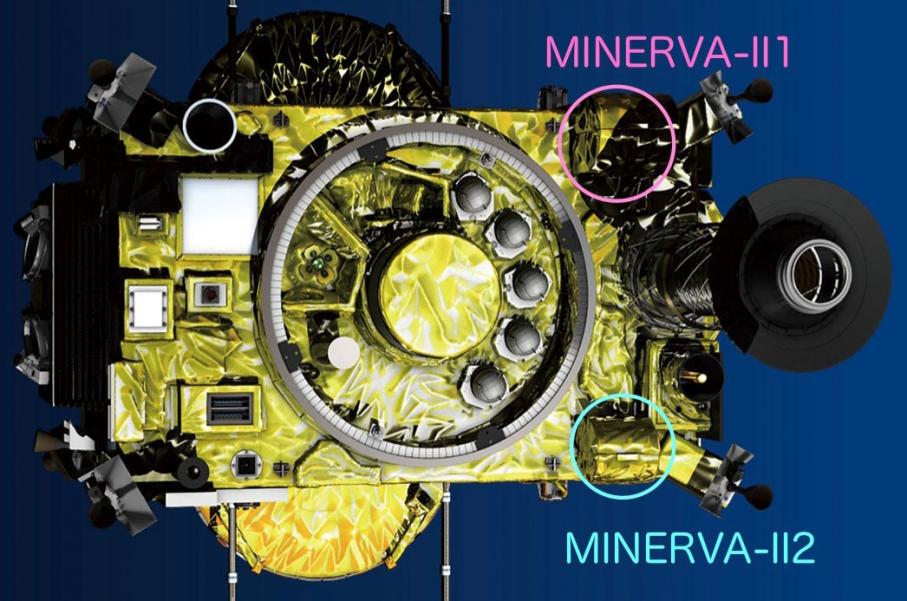 図1 「はやぶさ2」の下面に収納されたローバー「ミネルバⅡ」
図1 「はやぶさ2」の下面に収納されたローバー「ミネルバⅡ」
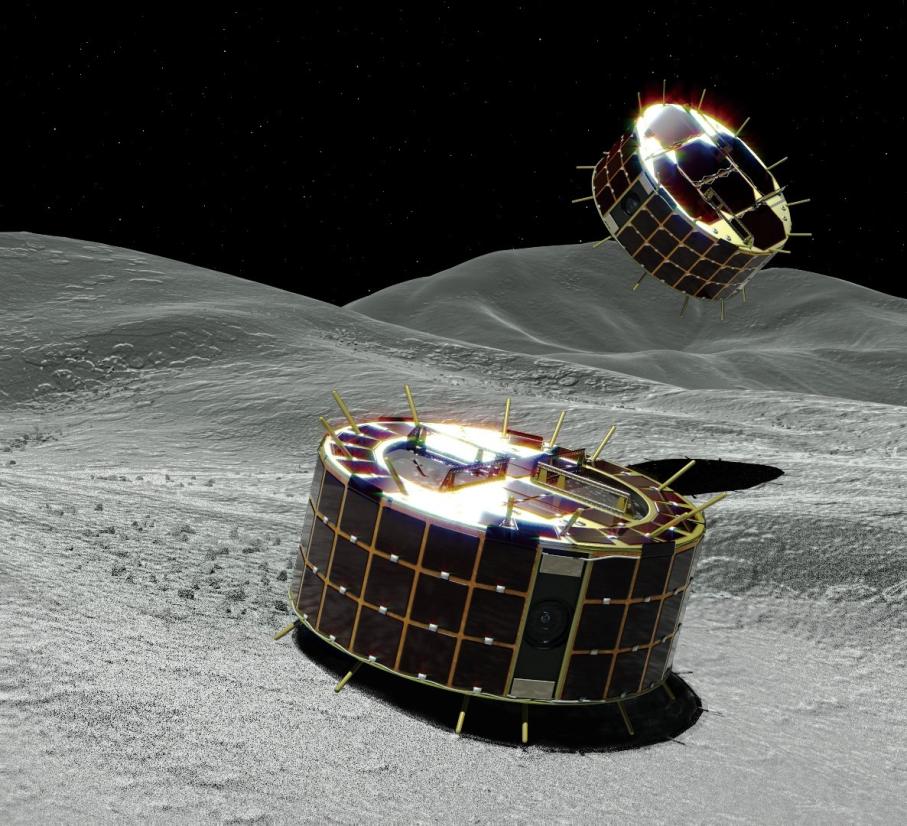 図2 着陸後の「ミネルバⅡ-1」の跳躍
図2 着陸後の「ミネルバⅡ-1」の跳躍
図3-1は9月21日、13:08(日本時間)頃に「ミネルバⅡ-1A」が撮影。探査機から分離した直後。「はやぶさ2」探査機(上方)とリュウグウ表面(下方)が映っています。ローバー本体が回転しているので画像がぶれていますが、「はやぶさ2」が大きくひろげた太陽電池パネルはよく分かりますね。図3-2は13:07(日本時間)頃に「ミネルバⅡ-1B」が撮影。これも探査機から分離直後。右下にリュウグウ表面。左上の薄くモヤがかかっている部分は太陽光のせいです。表面にはおそらく数十メートル級の岩がごろごろしていて、やはりサンプル収集のための着陸(10月下旬)には苦労しそうです。図3-3は、9月22日、11:44(日本時間)頃に「ミネルバⅡ-1A」が撮影。リュウグウ表面でホップしている最中に撮ったので、画像もダイナミックですね。
 図3-1 「ミネルバⅡ-1」が送ってきた画像
図3-1 「ミネルバⅡ-1」が送ってきた画像
 図3-2「ミネルバⅡ-1」が送ってきた画像
図3-2「ミネルバⅡ-1」が送ってきた画像
 図3-3 「ミネルバⅡ-1」が送ってきた画像
図3-3 「ミネルバⅡ-1」が送ってきた画像
図4には、リュウグウの表面に向けて降下しながら、だんだん大きく見えてくるリュウグウの姿をピックアップしてあります。もちろんこれは「はやぶさ2」本体のカメラがとらえたものです。「はやぶさ2」のチームは、この連続画像を、緊張の中にもワクワクしながら見守っていたに違いありません。
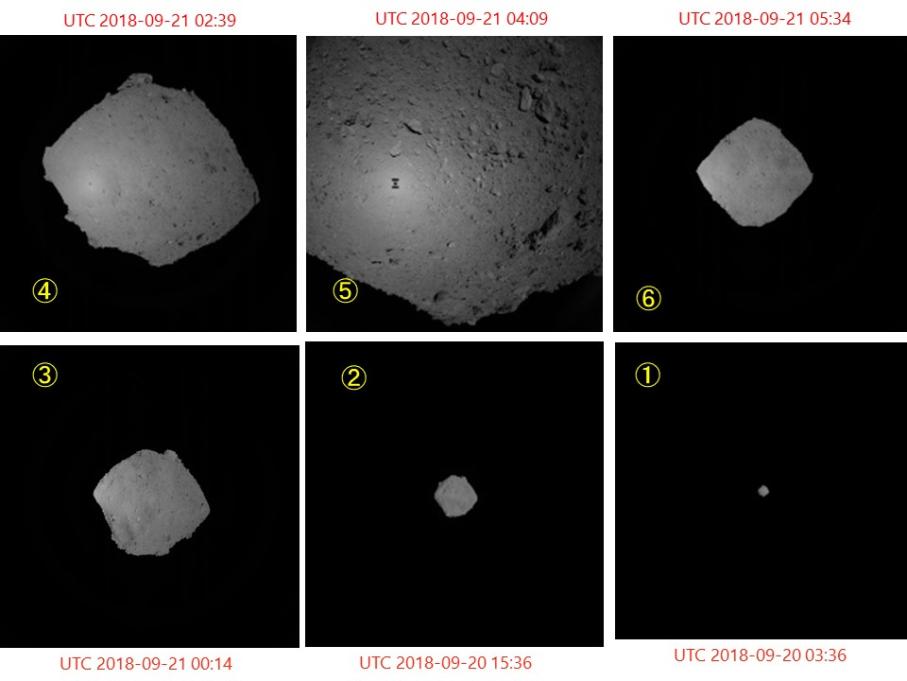 図4 「ミネルバⅡ-1」の降下オペレーションの際に「はやぶさ2」のカメラがとらえた小惑星リュウグウの姿
図4 「ミネルバⅡ-1」の降下オペレーションの際に「はやぶさ2」のカメラがとらえた小惑星リュウグウの姿
2台の「ミネルバⅡ-1」ローバーのカメラなどの観測機器が送ってきた画像やデータは、現在詳しく解析していますが、これまでの検討だけからでも、「はやぶさ2」本体が観測した結果とは異なる様子も見えてきています。降下・着陸のオペレーションの前に議論していたときには、リュウグウの表面が帯電していて、「ミネルバⅡ-1」が接触した途端に破壊されるのではないかと危ぶむ人もいたのですが、その関門は2台の「ミネルバⅡ-1」のいずれもが切り抜けたようです。
「ミネルバⅡ-1」担当の吉光徹雄准教授の談話──「ローバーから届いた画像を最初に見たときに、ブレ画像でがっかりしましたが、はやぶさ2探査機自体が 写っていたので、ロボットに仕込んだ通り撮像できてよかったです。また、小惑星表面でのホップ中の 画像が届いたときには、小天体での移動メカニズムの有効性を確認することができて、長年の研究成果が実を結んだことを実感しました」とコメントしています。彼は、初代「はやぶさ」の時も中心となって頑張っていましたから、今回の着陸成功を誰よりも喜んでいるでしょう。
この後、2台の「ミネルバⅡ-1」はリュウグウ表面での観測を続けますが、10月3日にはフランス、ドイツが開発した小型の着陸機「マスコット」が投下され、16時間の探査を行う予定です。また、東北大学などが開発した「ミネルバⅡ-2」というローバーも乗っていて、こちらは来年(多分夏頃)に着陸を予定しています。
その10月3日に着陸が予定されている小型ローバー「マスコット」(図5)について、紹介しておきましょうね。このローバーは、小惑星表層の物質を「その場」で観測して、「はやぶさ2」本体が遠くから観測したデータとサンプル収集によるミクロな観測の間を取り持つ役割を果たします。
小さな体に、赤外分光顕微鏡、広視野カメラ、熱放射計、磁力計を詰め込んでおり
(図6)、小粒ながら非常に貴重なデータを提供してくれるはずです。
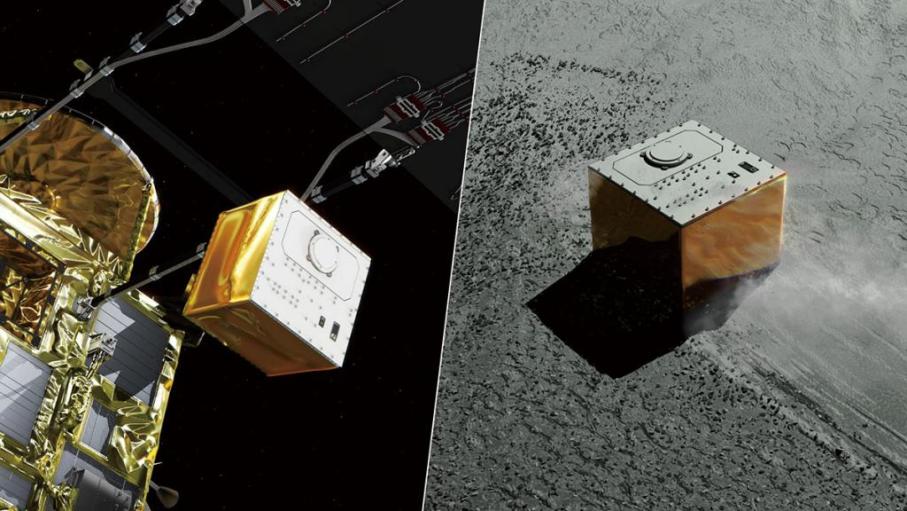 図5 「マスコット」ローバーのイメージ
図5 「マスコット」ローバーのイメージ
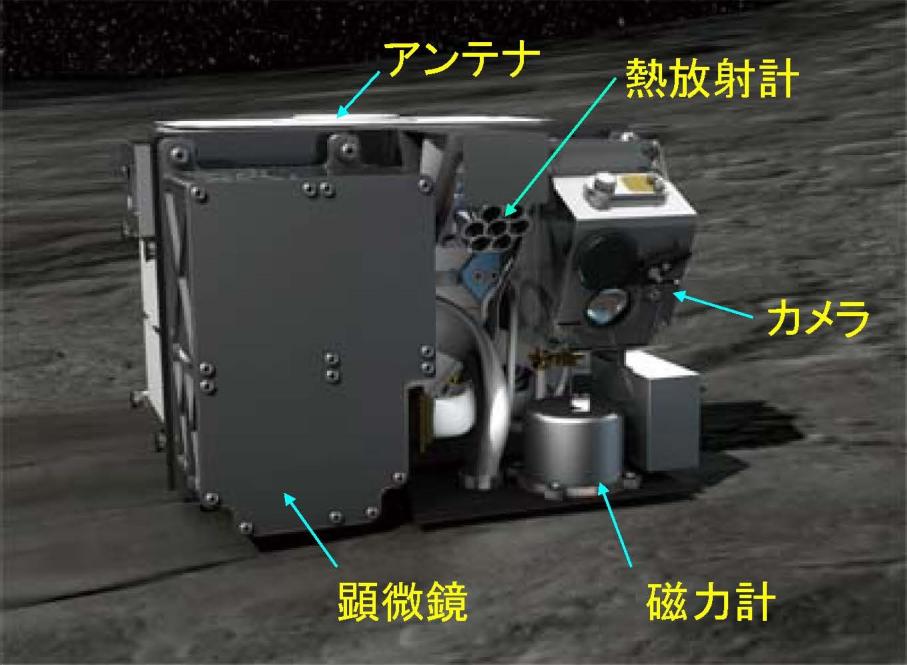 図6 「マスコット」の搭載機器
図6 「マスコット」の搭載機器
高度約100mで「はやぶさ2」の側面から分離され、自由落下によって小惑星表面に着地、何度かバウンドして静止します。それ以後は自律運用です。得られたデータは母船経由で地球まで届けます。最初に降りたところで一連の観測をすると、最大200mのジャンプ力を活かし、ホッピングで別の地点まで移動し、そこで再び一連の観測を行います。起き直りとホッピングは、内部に搭載した錘(おもり)付きのアームを回転させてトルクを発生させ、その反作用で行います(図7)。
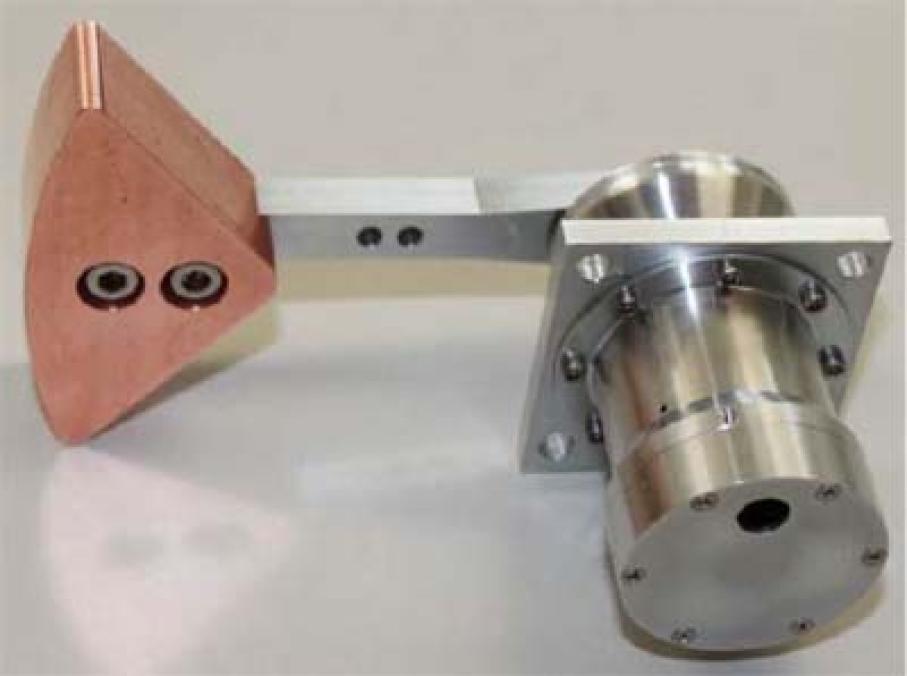 図7 MASCOTの錘つきアーム
図7 MASCOTの錘つきアーム
この「マスコット」を乗せてあげる代わりに、ヨーロッパの宇宙機関は、「はやぶさ2」の追跡に協力してくれているのです。「マスコット」の電源はリチウム一次電池で、寿命は小惑星時間でわずか2日分と短命ですが、ぜひ活躍してほしいものです。
[図クレジット]
図1,2,3,4 宇宙航空研究開発機構(JAXA) 図5,6,7 ドイツ航空宇宙センター(DLR)
