








【「はやぶさ2」のいま】
前にも書いたように、地球から見て小惑星リュウグウがちょうど太陽の向こうに見える位置にやってくる「合」(2018年11月下旬から1ヵ月あまり)の時は、当然「はやぶさ2」も「合」の位置にあるので、太陽が邪魔になり、きちんと「はやぶさ2」と交信できません。
でも、「はやぶさ2」チームは欲が深く、テストを兼ねた通信試験や、地球の大気を通り抜ける時に太陽からの電波が受ける影響を利用した電波科学観測、普段とは全く異なる「ビーコン運用」という方法などで、最低限の探査機情報を地上に送信するなど、「合」を逆手にとった運用をしていきます。
この厄介な期間には、半ばほったらかしになるので、目標の軌道から少しでもずれてしまうとリュウグウに衝突してしまう危険性があります。そこでさる11月23日、安全に過ごすため、「はやぶさ2」を、「合軌道」という特別の軌道に投入しました。その後に、探査機の軌道がそれで安全かどうかを丁寧に確かめました。その結果に基づいて、11月30日、リュウグウからの距離が約75kmの地点で、リュウグウから遠ざかる方向へ3.8mm/sだけ増速させる軌道修正を実施しました。
これで十分な安全を保てると考えています。そして次の軌道修正を合期間明けの12月25日(クリスマス!)に予定しています。合期間中は数日に1回の頻度で姿勢制御を行い、「はやぶさ2」を地球方向へ向け続けます。この「合軌道」では12月11日に小惑星からの距離が約110kmで最大となり、合期間が終わる12月29日に、小惑星から20kmの「ホームポジション」へ戻ることになります。
少し細かく説明しました。平たく言えば、連休をとるにあたっては、それなりの十分な準備をしなければいけないということを伝えたかっただけです。ただし、「はやぶさ2」チームは休むわけではありませんが……。
なお、「はやぶさ2」が最近撮影したリュウグウの動画が以下のページに掲載されています。興味ある人はのぞいてみてね。
http://www.hayabusa2.jaxa.jp/topics/20181030_TD1R3_CAMH/
さあそこで世界のニュースです。今週は、躍進めざましい中国の月への挑戦です。
【中国が「嫦娥(じょうが)4号」の打ち上げに成功──世界初の月の裏側軟着陸へ】
中国は、日本時間のさる12月8日午前3時半前、四川省の西昌衛星発射センター(図1)
から、月面探査機「嫦娥4号」を発射し、打ち上げは成功しました(図2, 図3)。
 図1 四川省西昌市の位置
図1 四川省西昌市の位置
 図2 「嫦娥4号」を搭載して打ち上げられた長征3Bロケット
図2 「嫦娥4号」を搭載して打ち上げられた長征3Bロケット
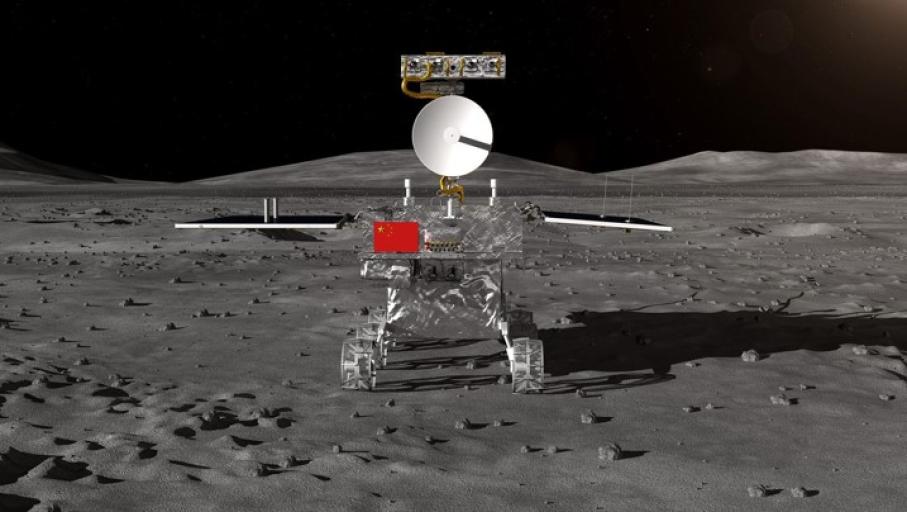 図3 「嫦娥4号」のローバー(想像図)
図3 「嫦娥4号」のローバー(想像図)
「嫦娥4号」は月の裏側に着陸することを目指しています。成功すれば、搭載しているローバー(探査車)が月の裏側を動き回ります。これまで各国のたくさんの月探査機が月を周回したり、月面に着陸したりしました。もちろん月の裏側も、月を周回する軌道から詳しく調べてきました。たとえば日本の「かぐや」も、月を周回しながら観測を行い、精密な地図を作っています(図4)。しかし裏側に着陸した探査機はありません。「嫦娥4号」が成功すると世界初です。
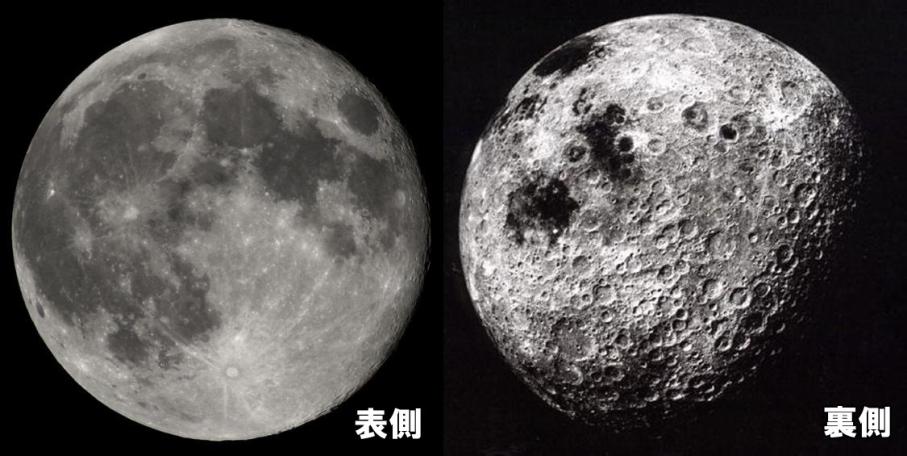 図4 月の表と裏(「かぐや」撮影)
図4 月の表と裏(「かぐや」撮影)
図4を見るとすぐに分かるように、月の表側と裏側は、様子が随分違いますね。月の裏側をこれまでよりも徹底的に調べて表側と比較することで、月がどのようにできたか(それは地球のでき方とも密接なつながりがあると考えられています)、そして現在の地球の生命の生き方との関係など重要な研究が飛躍的に進むと思われます。「嫦娥4号」は、中国では主として「工学的な目的」と言っていますから、本格的な調査はもっと後になるかもしれませんが、今回は、地形や中性子線などの月面環境を観測するほか、地質も調査する予定です。月の裏側に着陸する技術的な難しさが乗り越えられれば、世界中の科学者の目が一層月の裏側に注がれるので、今回のミッションがそのトリガーになるよう、成功を祈りたいですね。
【月の裏側探査にまつわる問題】
月の裏側に軟着陸させようとすると、探査機は当然自律的に一連の作業をしなければなりません。月の裏側は地球からは見えないので、地球上の管制センターと直接やり取りすることができないですからね。それに伴う難しさは当然あります。これまで他国が裏側ミッションを実行しなかったのはそれだけが理由ではありませんが、それも要因の一つです。
もう一つの裏側探査の難点は、着陸してからの交信です。これも直接は通信できないので、中国は図5のような方式を採用することにしました。裏側表面にいる探査機と、別の交信専門の衛星とが連絡をとり、その別の衛星が地上局と連絡するのです。こうしたやり方は、探査機が月面に着陸しない「かぐや」などでも行われたことがあります。
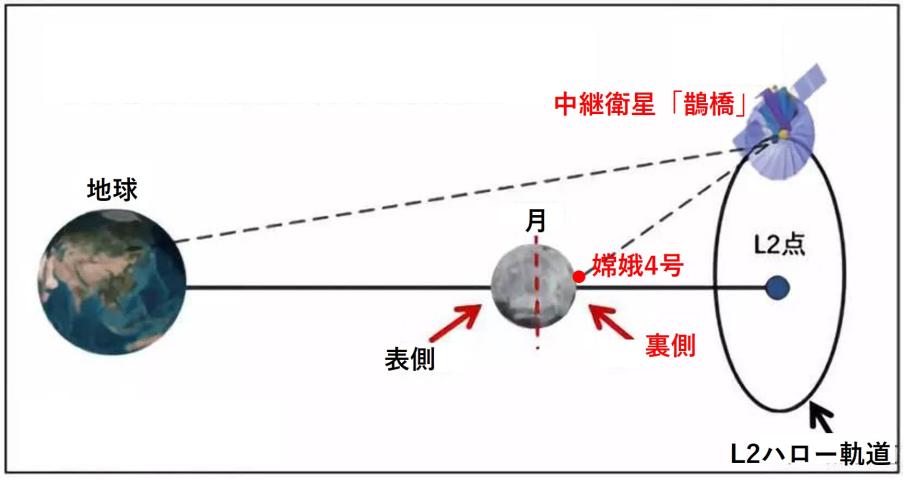 図5 裏側の嫦娥4号は中継衛星「鵲橋」を経由して地球と交信
図5 裏側の嫦娥4号は中継衛星「鵲橋」を経由して地球と交信
中国は、すでに今回の打ち上げに先立って、ことし5月に通信を中継するための「鵲橋(じゃくきょう、かささぎばし)」と命名した衛星を別に打ち上げ、地球と月の引力・遠心力の均衡点(ラグランジュ点)を回るハロー軌道に運びました。
【中国の月戦略】
2003年にスタートした中国の月への探査戦略は3つの段階から成っていて、
①周回──2007年と2010年にそれぞれ「嫦娥1号、2号」(図6、図7)を打ち上げ、月を撮影。月の立体画像を獲得しました。
 図6 「嫦娥1号」
図6 「嫦娥1号」
 図7 「嫦娥2号」
図7 「嫦娥2号」
②着陸──2013年に「嫦娥3号」を打ち上げ、無人のローバーで月面調査。しかしこのローバー「玉兎」(図8)が途中で機能を停止したことで話題になりました。「嫦娥4号」はこの「第2段階」の最終機です。
 図8 「嫦娥3号」から出て月面を移動するローバー「玉兎」(想像図)
図8 「嫦娥3号」から出て月面を移動するローバー「玉兎」(想像図)
③回収──月のサンプルリターン。2019年に「嫦娥5号」(図9)を打ち上げる予定。
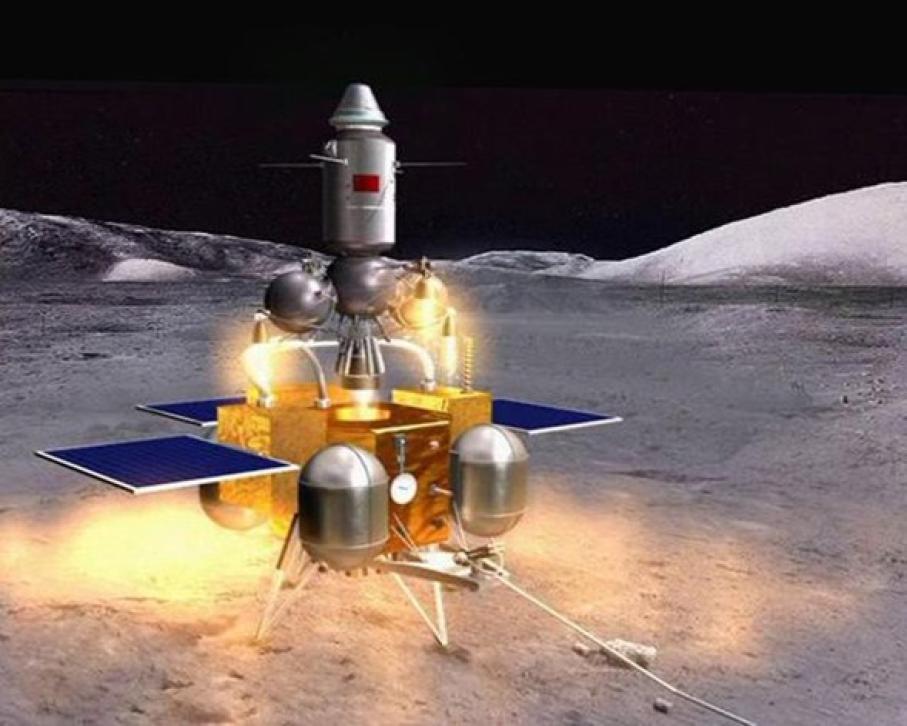 図9 サンプルリターン「嫦娥5号」(想像図)
図9 サンプルリターン「嫦娥5号」(想像図)
このたび打ち上げに成功した「嫦娥4号」は、月周回をしながら準備を重ね、2019年1月には月の裏側に着陸する予定で、それから分離したローバーが地形・地質構造などを収集し、オランダやドイツなどの植栽や昆虫の孵化実験などにも挑みます。
中国はその後の活動として、月の有人探査や月面基地の建設にも意欲を示していますが、これはまだまだ先の話。
【中国の月探査機関係の命名】
「嫦娥」──日本読みは「じょうが」。中国神話に登場する女性(図10)。元は仙女だった嫦娥は、地上に下りた時に不死でなくなり、有名な皇帝「后羿」(こうげい)と結婚したのですが、夫が西王母からもらい受けた不死の薬を盗んで飲んで、月の宮殿に逃げ、蟇蛙(ヒキガエル)にされたと伝えられています。后羿は、嫦娥に会いたい一心で月に向かってお供えをしました。これが「お月見」の始まりとされています。
 図10 「嫦娥奔月」(月岡芳年・画)
図10 「嫦娥奔月」(月岡芳年・画)
「鵲橋」──日本語読みは「じゃっきょう」または「かささぎばし」。「鵲」は「かささぎ」のこと。中国の伝説で旧暦の7月7日の七夕の日に天の川上にできる橋(図11)の名前。百人一首にも「かささぎの渡せる橋に置く霜の白きを見れば夜ぞ更けにける」(中納言家持)とあります。
 図11 「鵲橋仙」(讀秦觀・画)
図11 「鵲橋仙」(讀秦觀・画)
「玉兎」──臼と杵で餅をつくという中国の伝説の中のウサギ(図12)。
 図12 月百姿「孫悟空・玉兎」(月岡芳年・画)
図12 月百姿「孫悟空・玉兎」(月岡芳年・画)
[図クレジット]図1~3 中国航天局 図4 JAXA 図5 中国航天局(文字のみ編集)
図6~9 中国航天局 図10 月岡芳年・画 図11 讀秦觀・画 図12 月岡芳年・画
